Un-harboring Trash

How might we design a system to autonomously collect and store aquatic trash in city harbors?

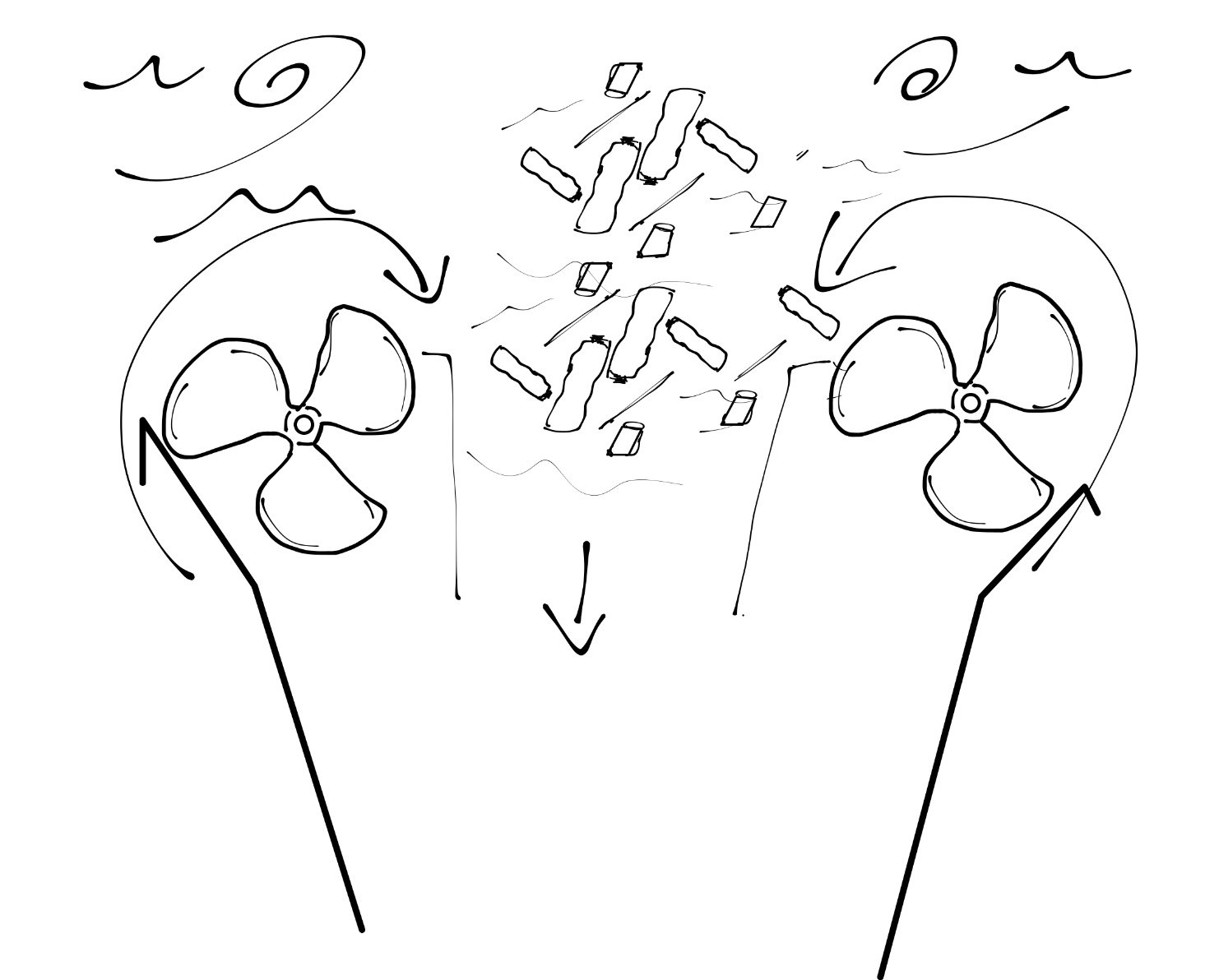
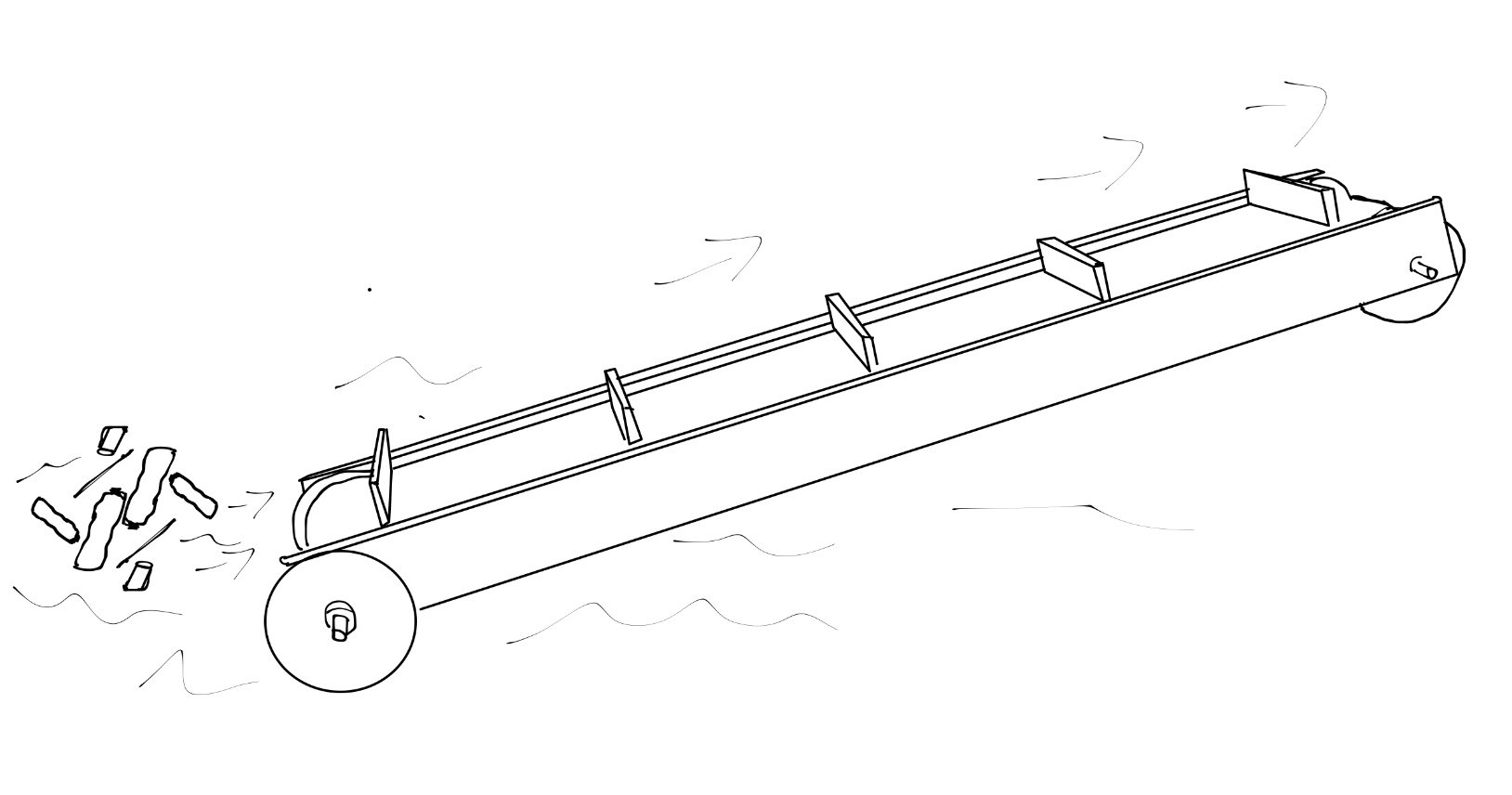
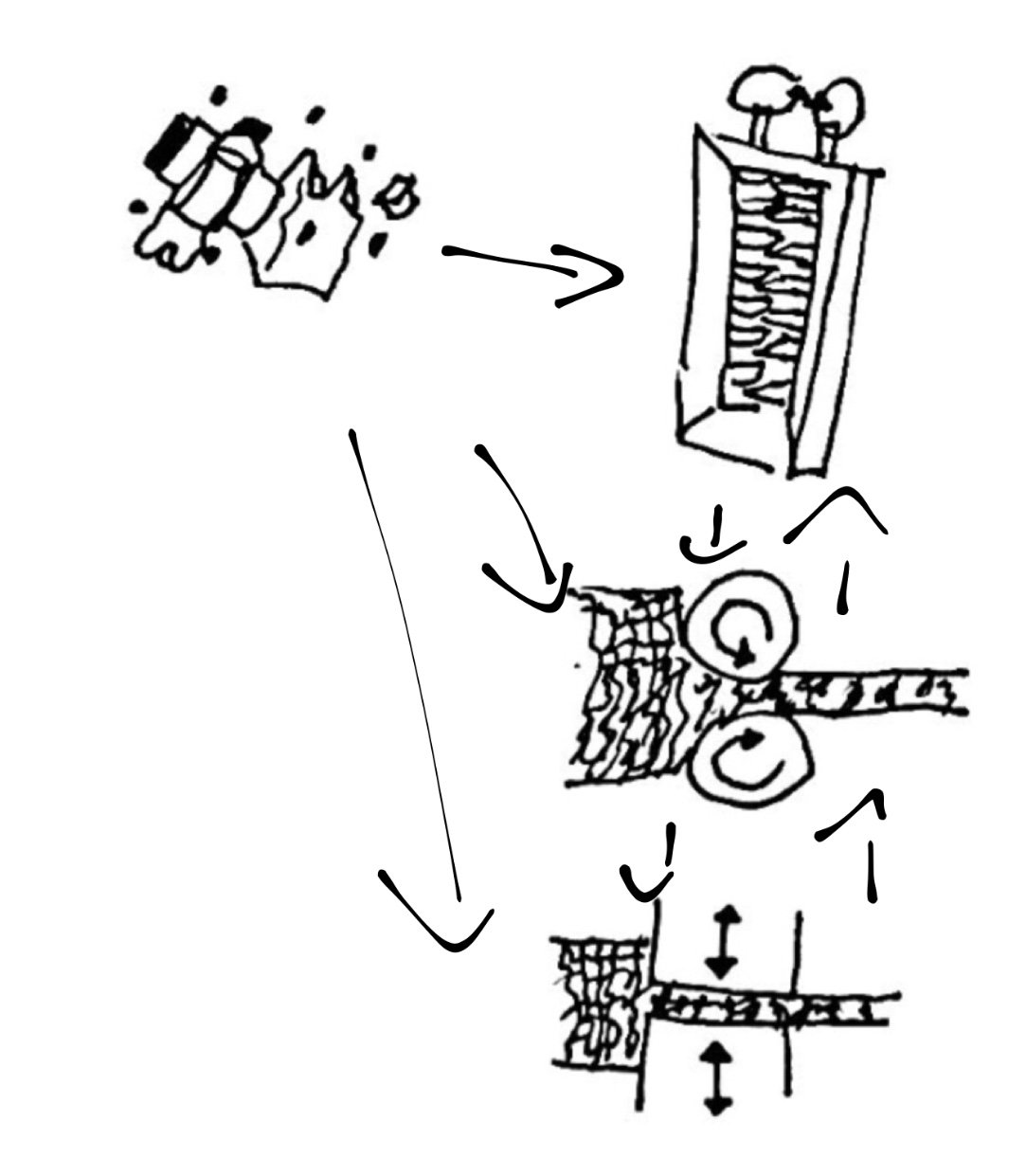
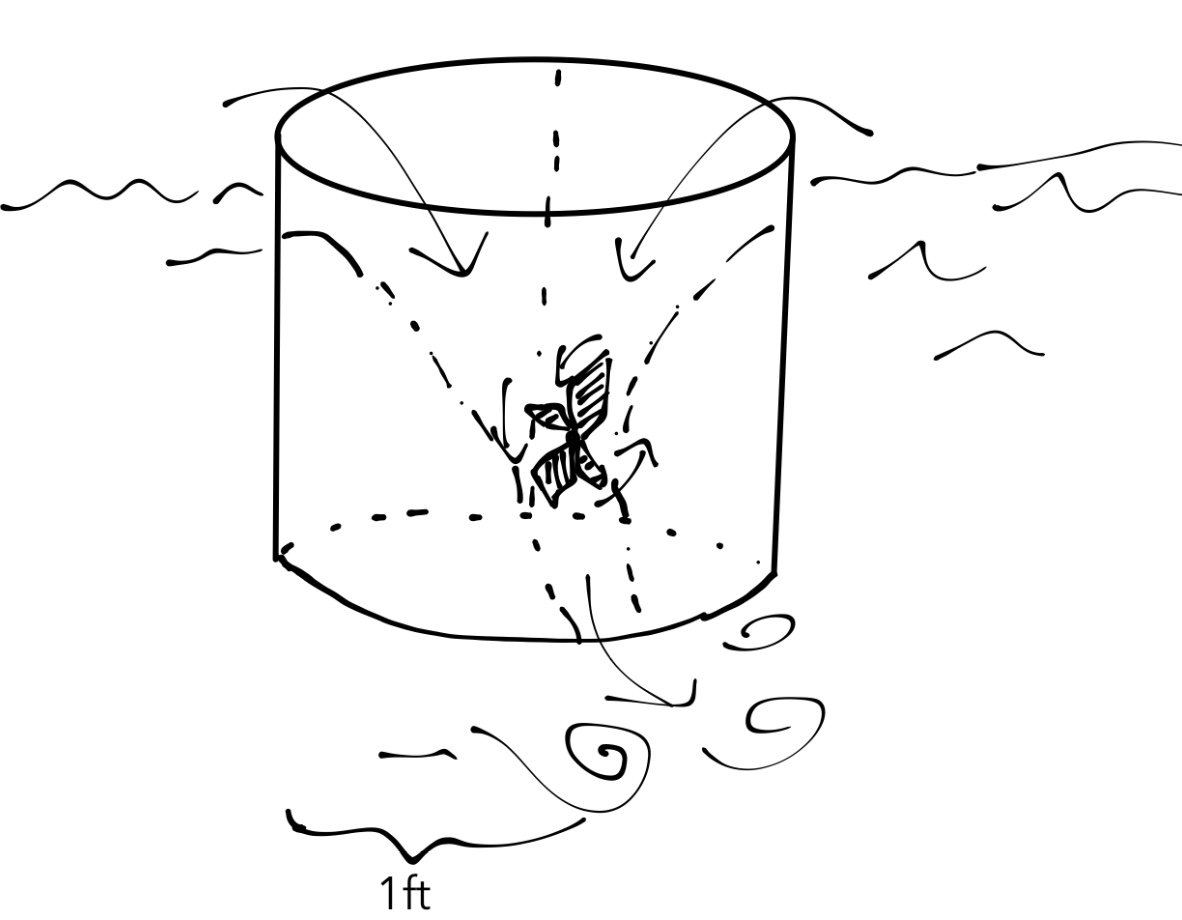
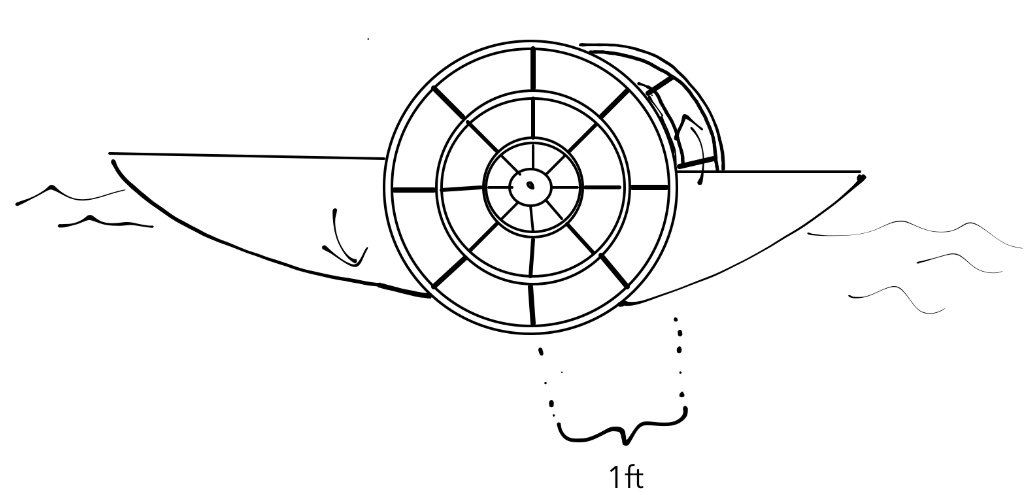
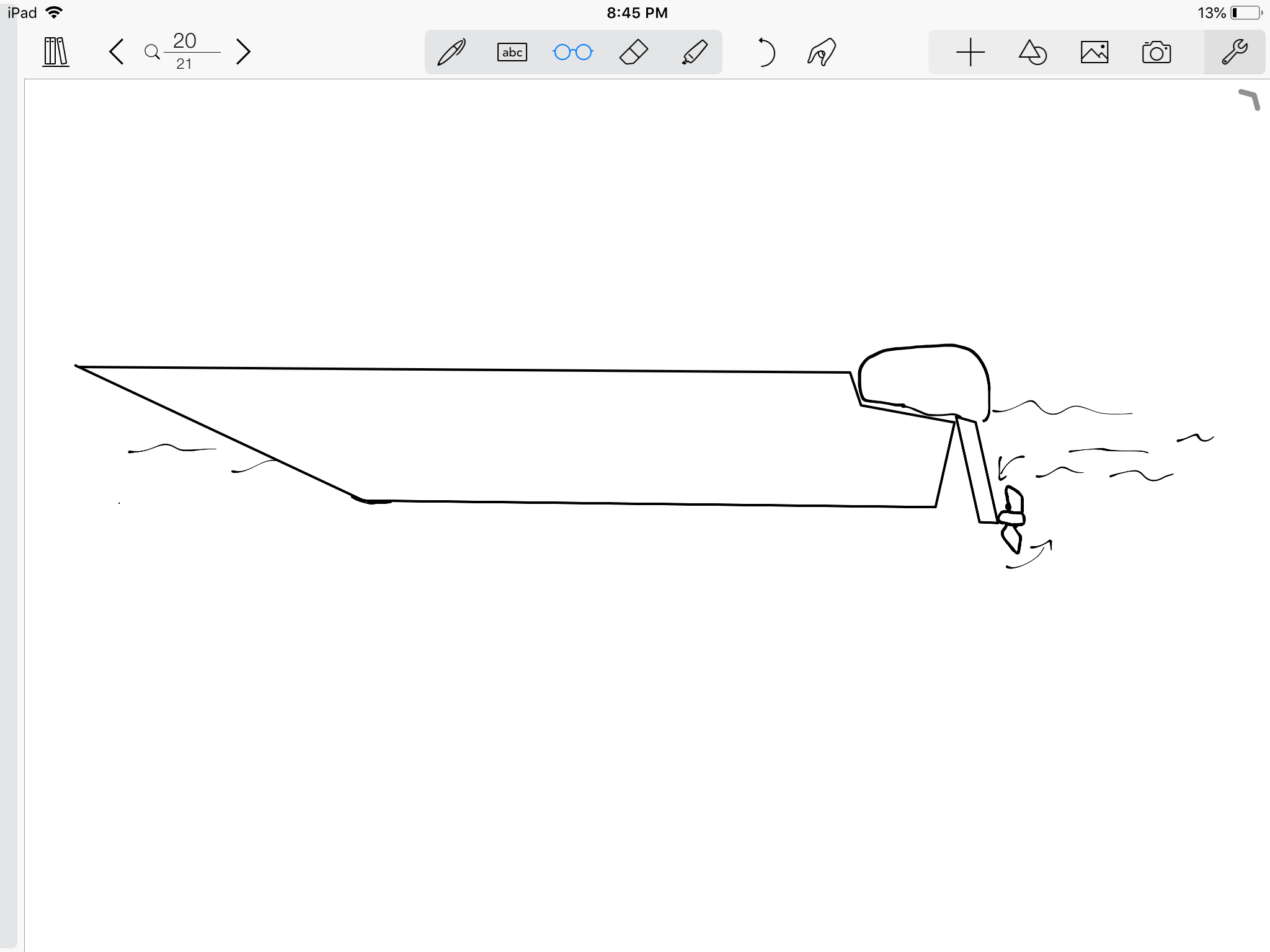
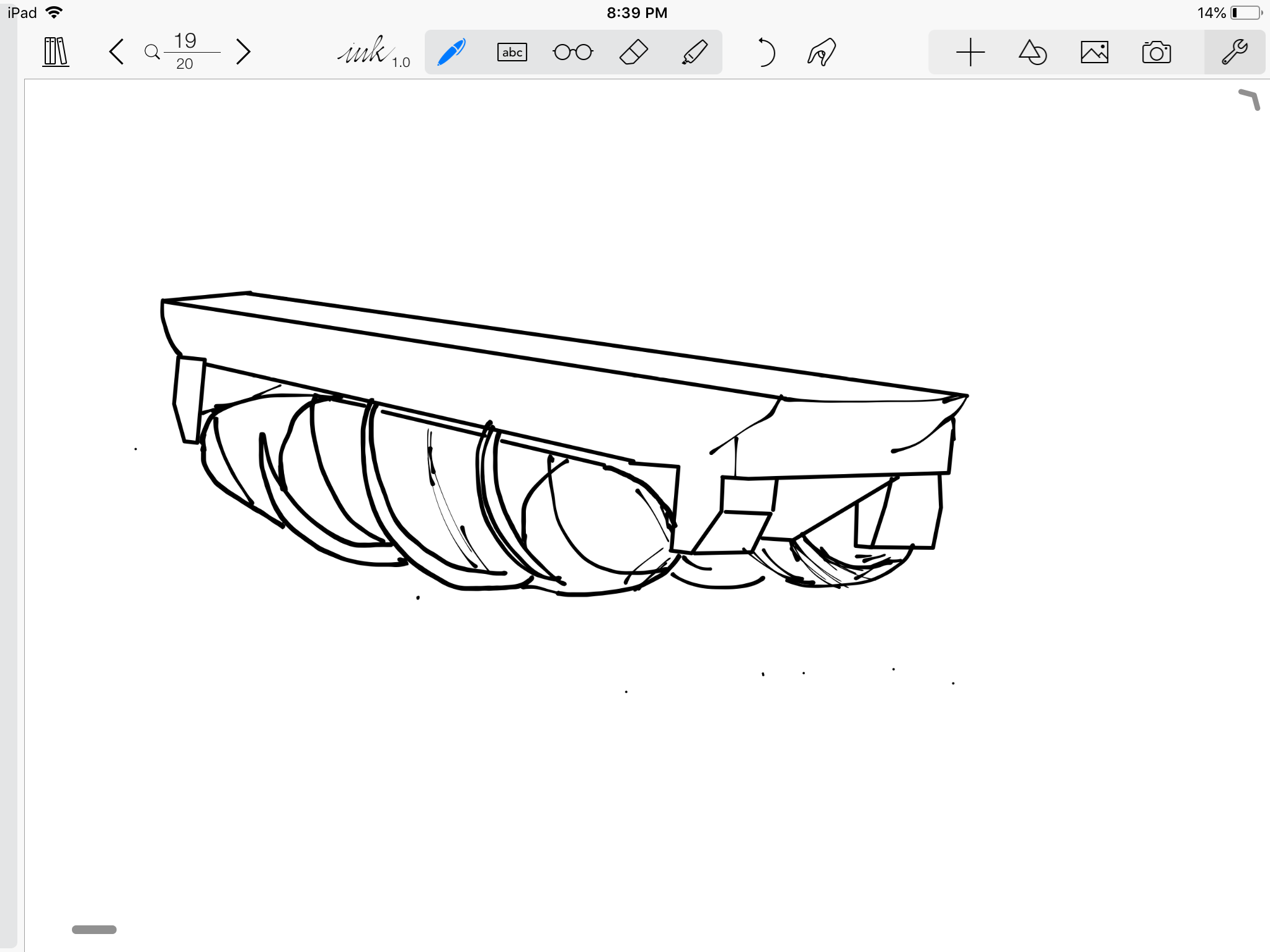
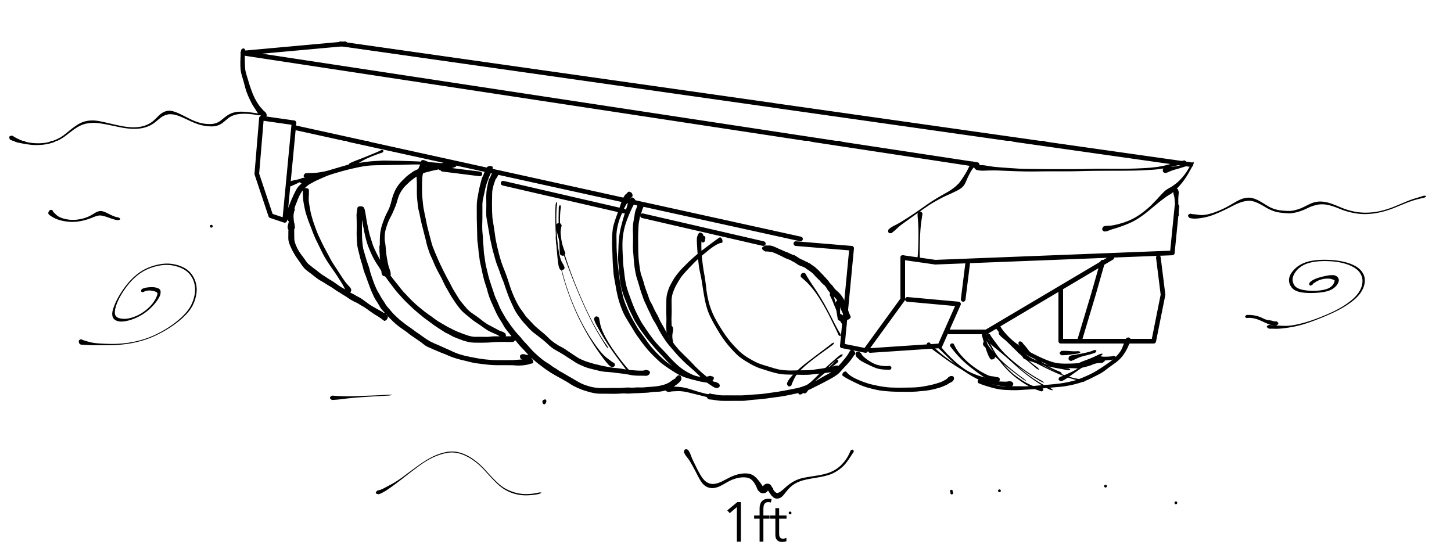
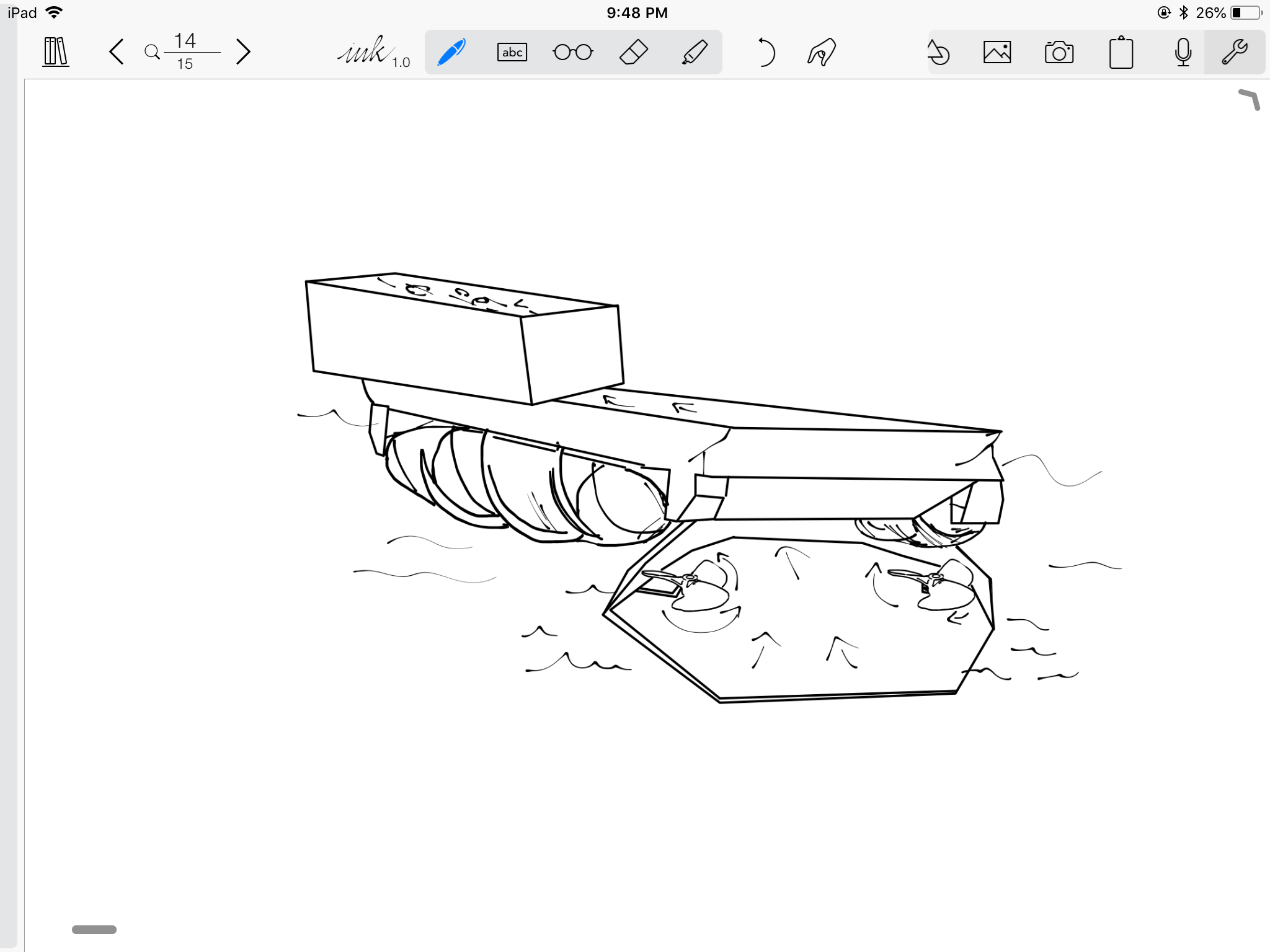
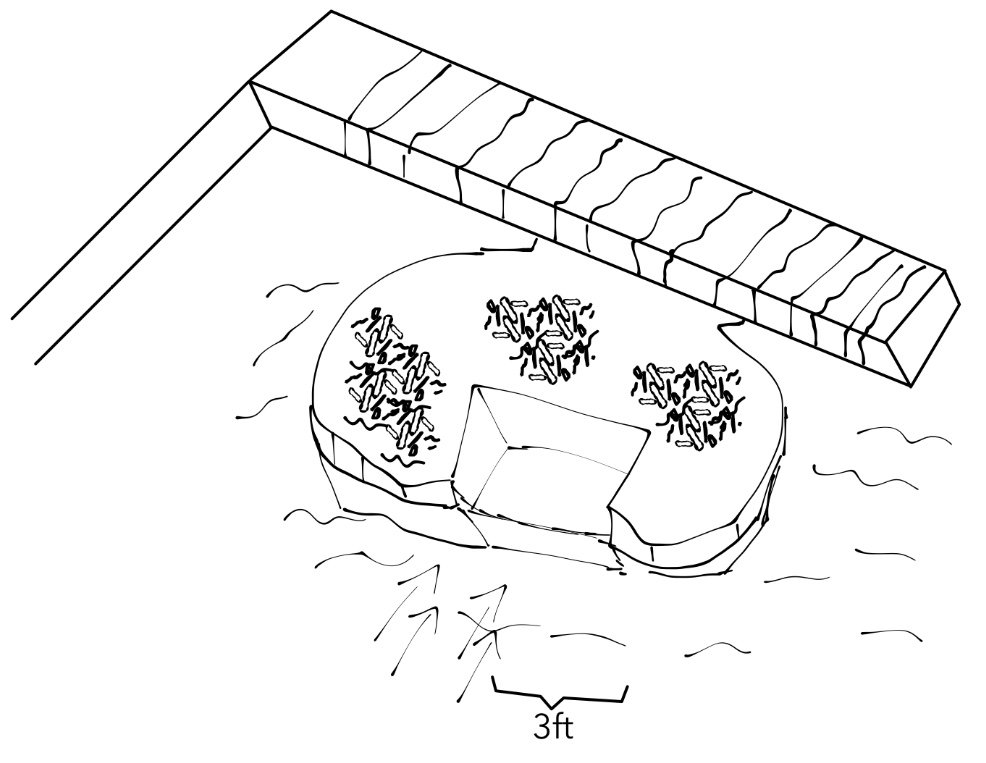
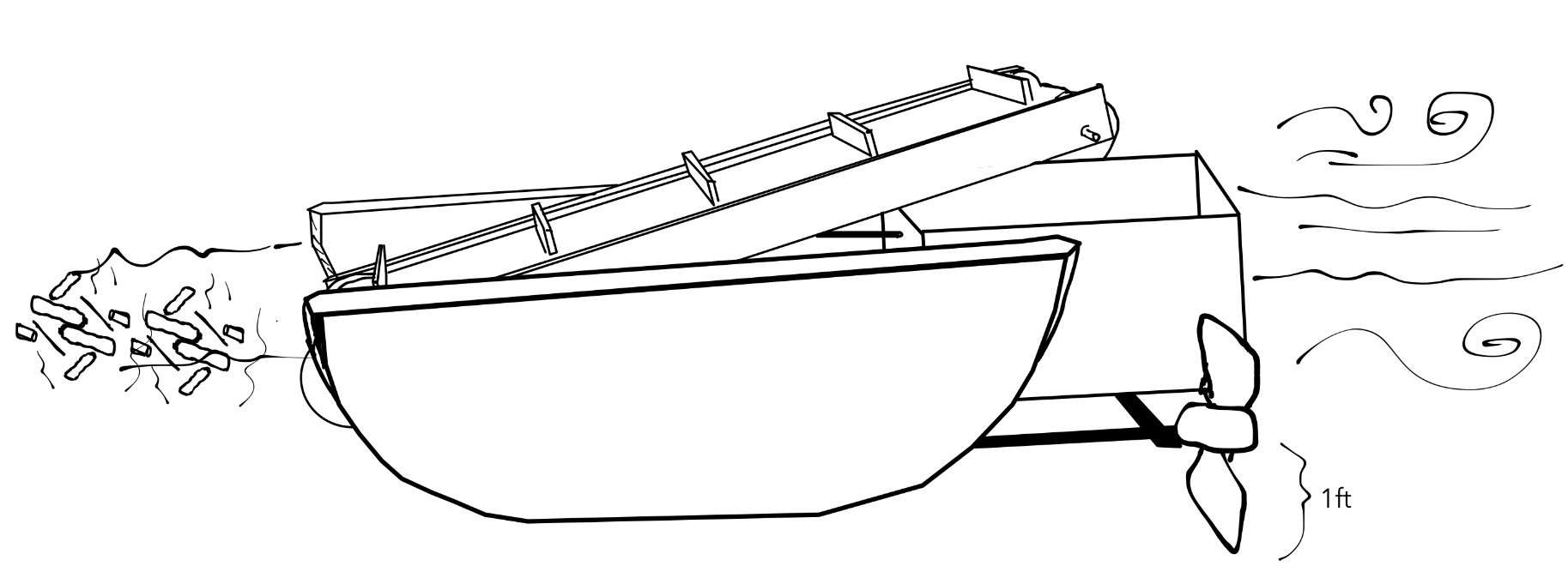
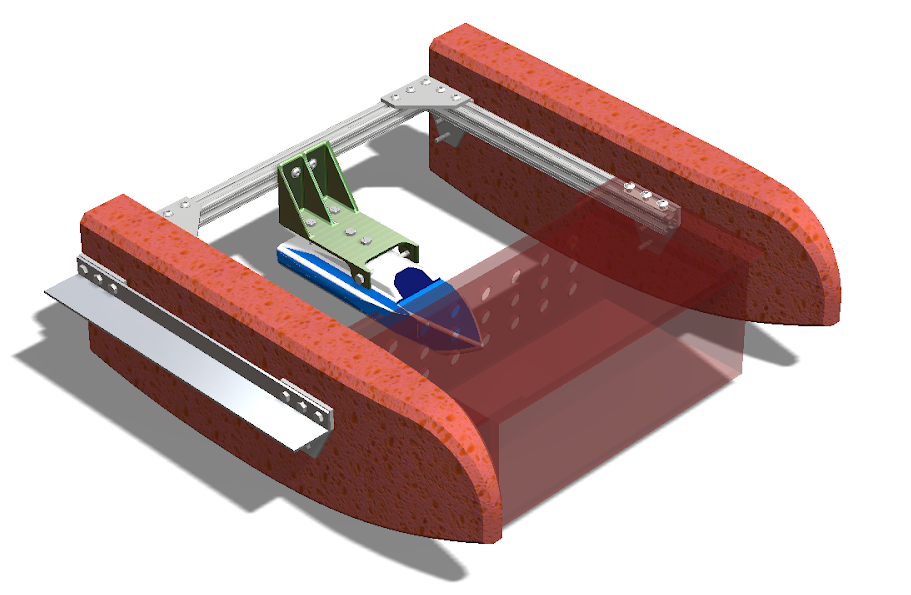
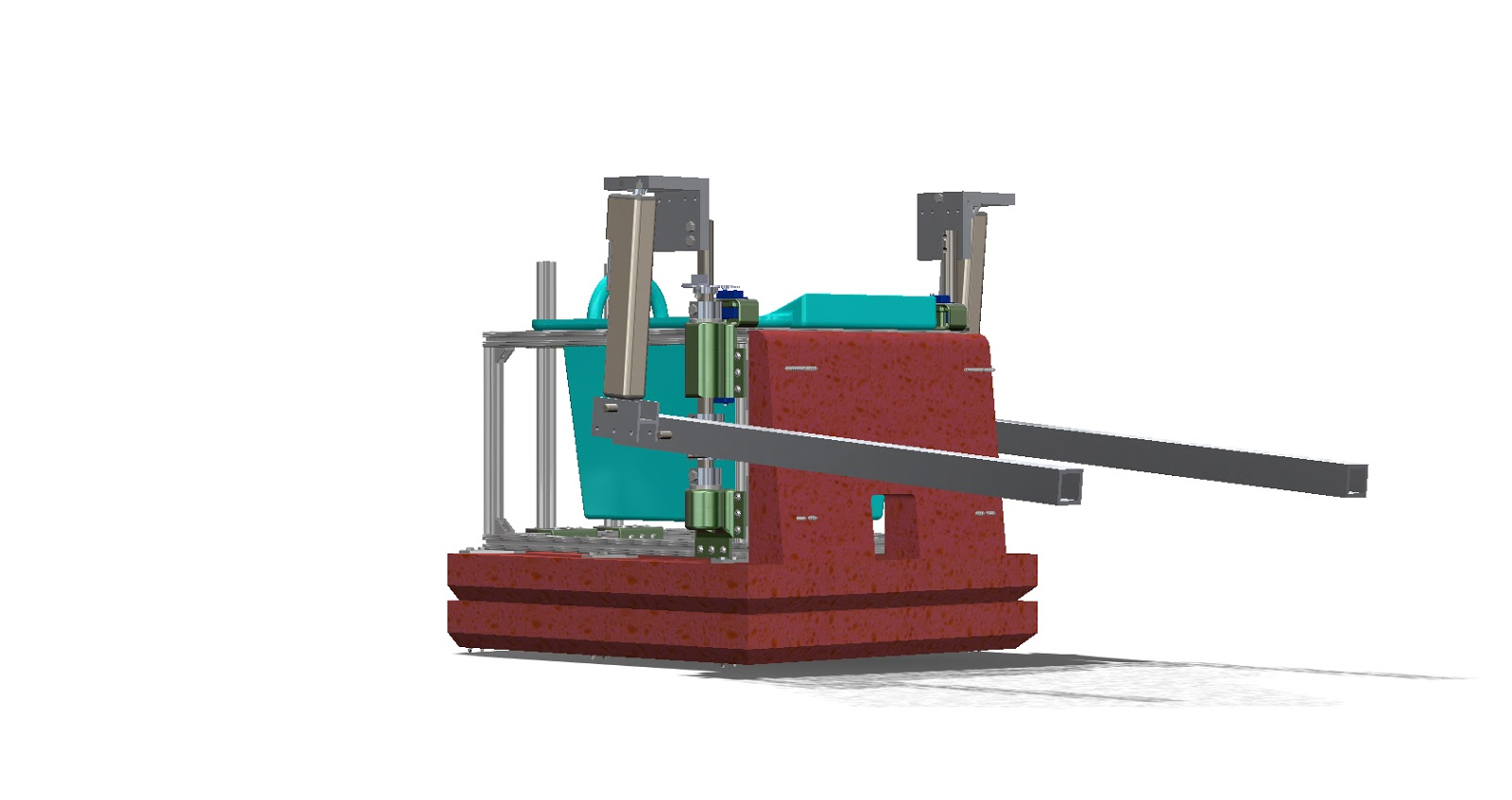
In this year-long capstone project, my team of three senior mechanical engineering students researched, designed, and prototyped a machine to address trash collection in a marine environment. Through collaborative ideation and research, we developed concept sketches and iterated through multiple CAD designs. Cardboard prototypes of an open-mouth debris collector informed the mechanical design of the lifting lever arms on the stationary docking and storage unit. Field tests and experiments in a controlled aquatic environment, using gymnasium rowing tanks, ensured the functionality and buoyancy of our docking station and collection vehicle.
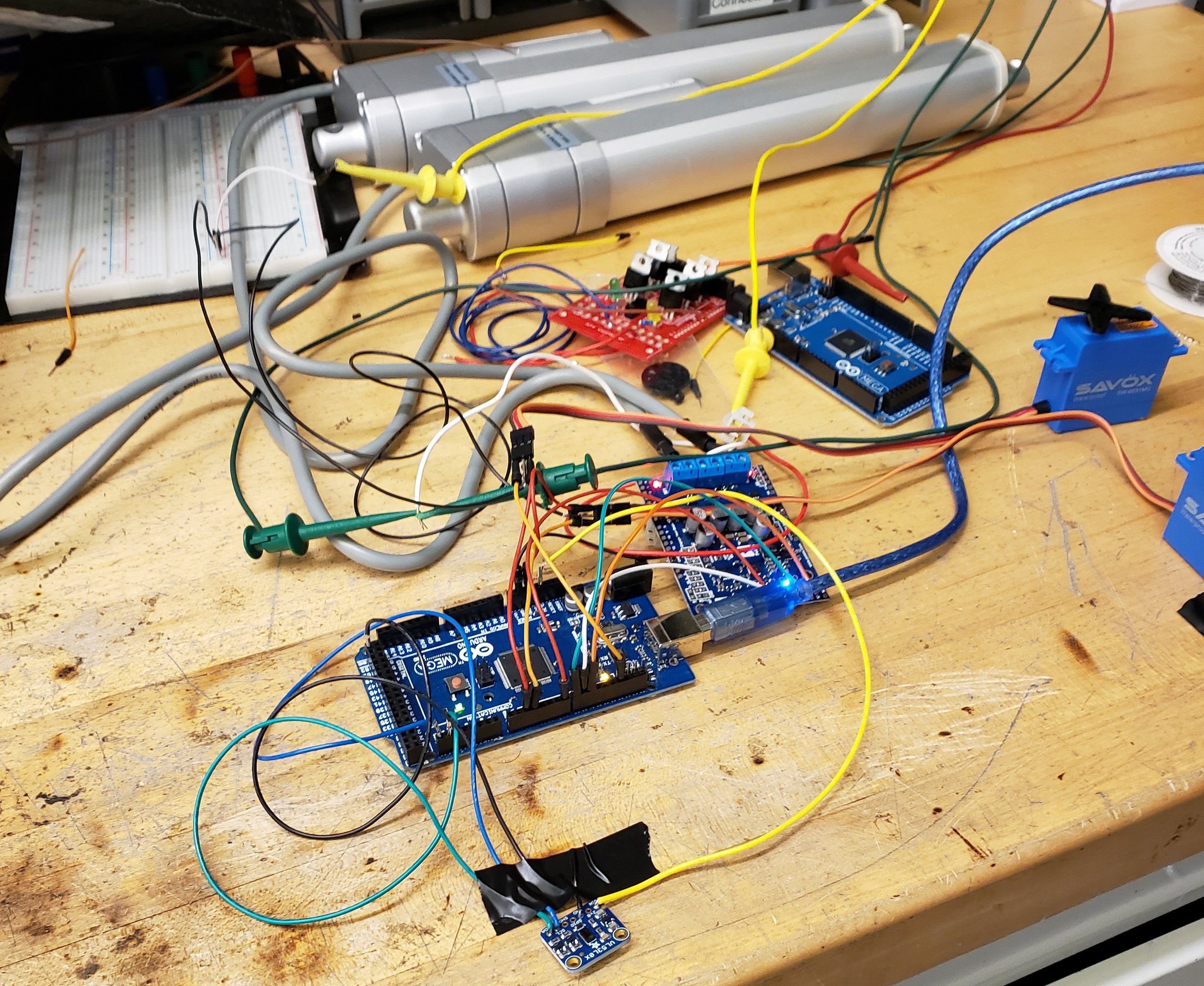
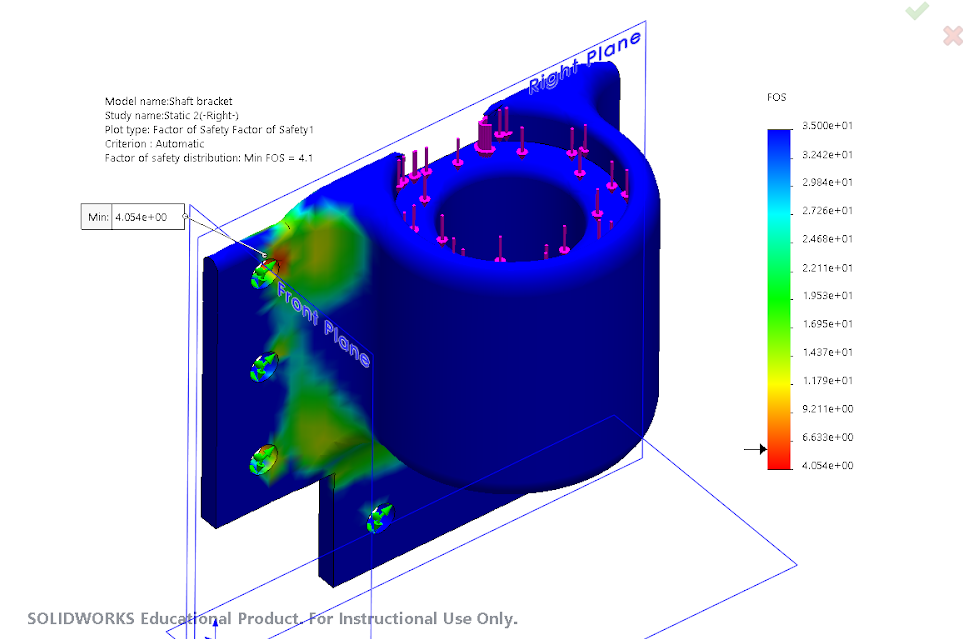
As the lead for electronic architecture, I designed the system using an Arduino Mega to control all motors and sensors. To handle the power requirements of the 25V linear actuators and heavy-duty servo motors on the docking station arms, I implemented an external power source. Additionally, I conducted SolidWorks strength simulations for the 3D-printed connecting pieces.
To ensure the effectiveness of the vehicle-to-station interface, I conducted in-lab experiments and maintained consistency and accuracy throughout the project.
This harbor-based docking station project exemplifies our team's work in mechanical engineering and collaborative problem-solving, aiming to create innovative solutions for environmental challenges.
Additional ketches, prototypes, fabrication, and testing images: